來源:微信公眾號【北彙信息】
作者 | 木槿
小編 | 不吃豬頭肉
概述
1.1TSN與DDS的獨立優勢與局限
隨著智能網聯汽車和車載網絡架構的不斷迭代���,車載網絡對實時性�����、確定性和高效數據分發的需求日益嚴苛。
TSN和DDS的結合為車載以太網提供了確定性實時通信(TSN)與靈活數據分發(DDS)的雙重優勢�����,尤其適用於自動駕駛��、智能座艙等高要求場景。
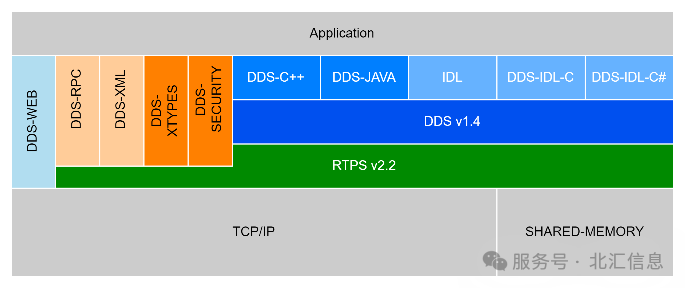
圖1 DDS協議概述
其中�����,數據分發服務(DDS)是對象管理組織(OMG)製定的一係列標準��,旨在為工業互聯網��、信息物理係統和關鍵任務應用提供連接性�����、互操作性和可移植性。
優勢
高效數據分發:基於發布-訂閱模型���,支持動態數據發現和異構係統互操作����,適合車載多傳感器數據共享��;
豐富的QoS策略:提供23種服務質量策略(如延遲預算�����、可靠性)����,可靈活適配不同應用場景����;
平台無關性:屏蔽底層OS和硬件差異�,支持從MCU到域控製器的跨平台部署。
劣勢
資源開銷大:完整DDS協議棧對MCU等資源受限設備負擔較重���,需輕量化裁剪��;
實時性依賴底層網絡:DDS的QoS策略(如延遲控製)需TSN等底層技術支持才能充分發揮。
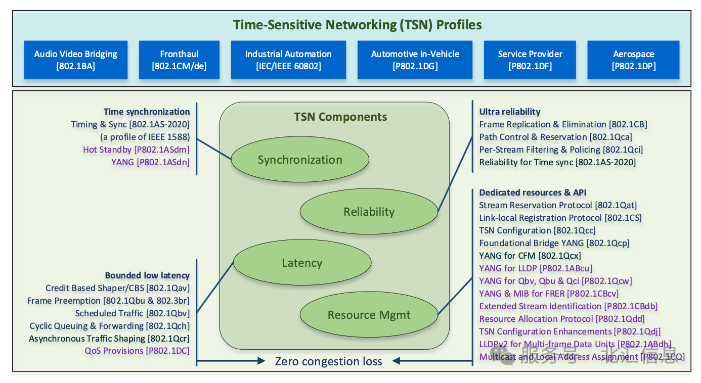
圖2 TSN協議概述
時間敏感網絡(TSN)是由IEEE 802.1工作組下屬TSN任務組開發的標準集合���,其目標是通過標準以太網實現確定性���、高可靠性的通信。憑借對不同服務質量(QoS)級別的支持�����,單一TSN網絡基礎設施可同時傳輸具有實時性要求的關鍵數據與非關鍵數據。
優勢
確定性實時傳輸:基於IEEE 802.1標準(如Qbv流量調度���、gPTP時間同步)��,TSN可保障關鍵數據(如刹車控製信號)的微秒級低延遲傳輸���;
資源隔離與冗餘:通過幀搶占(Qbu)和幀複製消除(802.1CB)機製����,避免網絡擁塞並提升容錯性�����;
標準化硬件兼容:依托傳統以太網架構�,降低部署成本。
劣勢
配置複雜:需靜態規劃流量優先級和時間窗口�����,難以適應動態場景(如突發V2X通信)��;
僅解決底層問題:無法直接解決應用層的實時性挑戰(如任務調度抖動)。
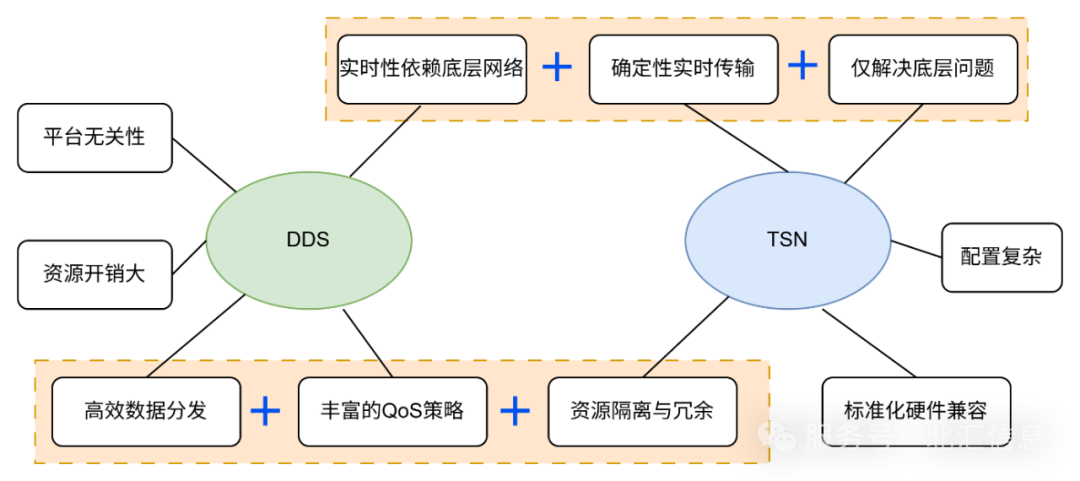
圖3 TSN與DDS的獨立優劣與協同效應表現
上述兩種技術��,不知道大家有沒有發現它們之間可以進行結合互補���,更進一步產生協同效應�����?
1.2.兩者結合:垂直整合實現全棧確定性
通過OMG DDS-TSN規範的推進��,兩者融合可產生以下協同效應:
DDS在應用層定義“需要什麼樣的實時性”(What)����,TSN在網絡層解決“如何實現這種實時性”(How)。
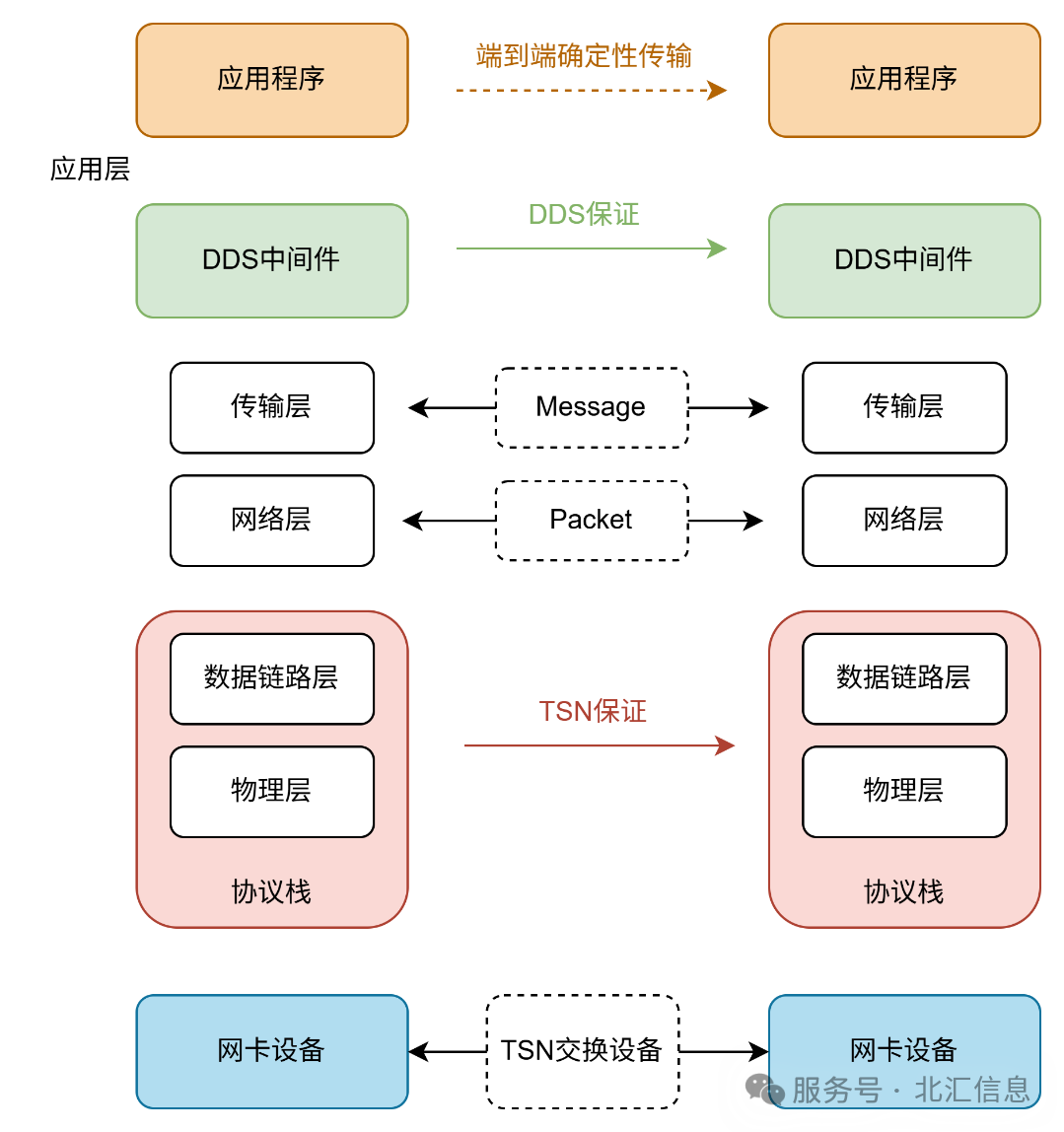
圖4 DDS-TSN的結合實現
主要細分為以下幾部分
1. 分層協作:從應用到網絡的確定性貫通
DDS作為網絡通信中間件��,DDS通過發布-訂閱模型管理數據分發邏輯���,並定義端到端的QoS策略(如截止時間�、可靠性����、優先級)���,但依賴底層網絡滿足其實時性需求。
TSN作為底層(L2)技術��,TSN通過時間同步��、流量調度和幀搶占等機製���,為以太網提供確定性傳輸能力�,但不涉及應用層的數據語義與邏輯。
綜合來看�,DDS的QoS需求(如低延遲�、時序保障)需要TSN的網絡能力支撐��,而TSN的確定性傳輸需要DDS的應用層調度配合。兩者結合後����,形成“應用意圖→網絡執行”的閉環����,實現真正的端到端確定性。
2. 時間同步的全局一致性
TSN通過IEEE 802.1AS實現整網的微秒級時間同步�����,為DDS的全局數據空間(如時間戳一致性��、事件順序性)提供基礎。例如:DDS內置的TimeBasedFilter與TSN gPTP時鍾綁定����,確保數據時效性判斷基於同一時間基準。
3.開放標準與解耦架構的兼容性
DDS不綁定特定網絡協議���,TSN不限定上層應用�����,兩者均為開放標準。
這種解耦設計允許
DDS通過TSN網絡實現確定性傳輸����,同時兼容非TSN網絡(如傳統IP網絡)��;
TSN可同時承載DDS以外的其他協議(如HTTP���、DoIP)���,最大化基礎設施利用率。
DDS-TSN實現
DDS-TSN實現不隻需要從理論層麵來陳述�,還需走過設計-驗證的整個流程。接下來將從需求評估�、方案設計�,搭建原型�,評估指標設計��,實驗結果展示幾個方麵來說明下如何具體實現DDS-TSN設計。
2.1.需求評估
所有的網絡設計方案都服務於功能場景需求�����,所以本階段的重要任務是需要將功能需求轉化為需要的usecase描述���,並從中評估識別出關於數據流的實時性�、可靠性�����、架構等需求�����,便於後續的TSN和DDS的方案設計。
收集整理車載網絡通信應用場景�����,分析應用層通信需求和約束條件���,以自動駕駛舉例:
時間同步
傳輸時延約束
可靠性:盡力而為還是可靠重傳
鏈路冗餘:數據是否需要鏈路冗餘
……
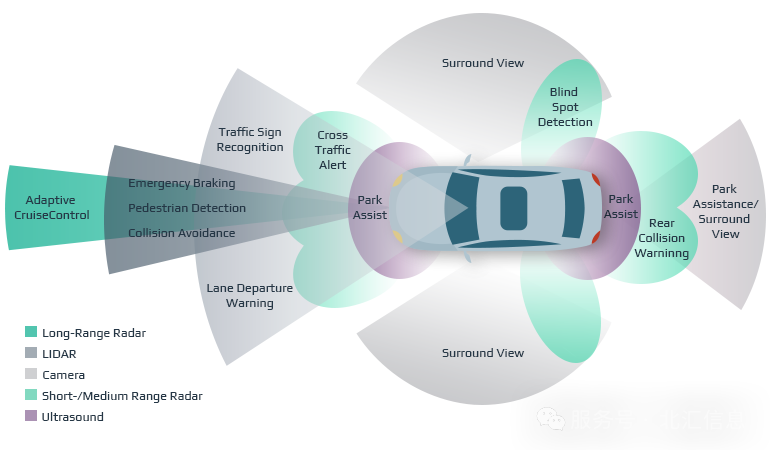
圖5 自動駕駛相關功能場景
2.2.方案設計
在兩者結合的方案設計中�,有2種方式來進行:
一個是在DDS設計的基礎上拓展TSN
另一種則是在TSN設計的基礎上拓展DDS
本文的方案設計采取前一種方式。首先設計DDS係統�����,然後在TSN上部署�,實現兩者的結合。
1.TSN Talker/Listener和DDS DataWriter/DataReader之間的映射
DDS采用強類型的數據中心發布-訂閱模型��,其中DataWriter負責更新特定類型數據���,匹配的DataReader則監聽這些更新。
TSN同樣存在Talker(發送端)和Listener(接收端)概念����,Talker可向多個Listener發送數據流。
如OMG DDS-TSN規範所定義�,兩者映射的具體配置如下:
Talker定義為DataWriter(比如下圖中ECU1是作為stream1的Talker1����,也是DDS的DataWriter1)
Listener定義為DataReader(比如下圖中ECU2是作為stream1的Listener1�����,也是DDS的DataReader1)
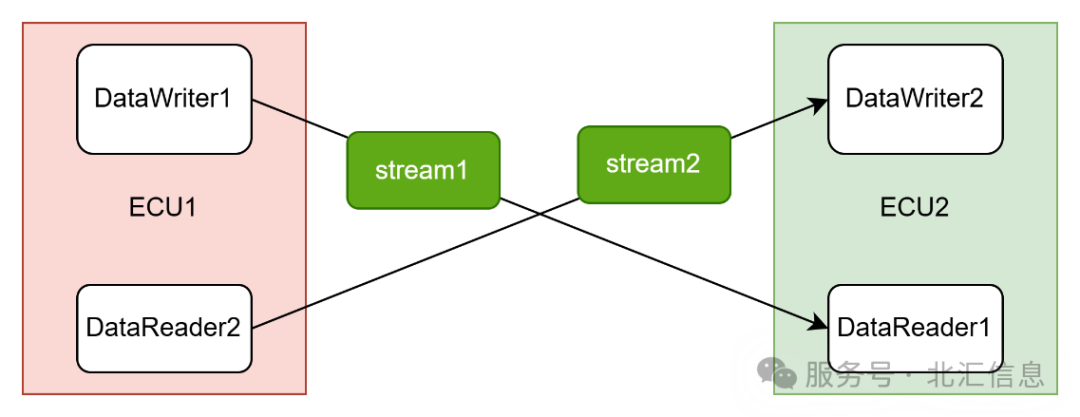
圖6 TSN Talker/Listener和DDS DataWriter/DataReader之間的映射示例
2.Topic和流量的映射
在DDS中Topic可以關聯多個發送端或接收端����,會自動映射出多條流。而TSN中則是傳統的數據流傳輸����,需要將二者聯係起來並唯一標識其中每條數據流。具體配置如下:
每個 TSNTalker 提供的TSN流量都應進行流標識處理���,這個是進行映射的重要前提。
根據上一步需求評估的輸出來定義Topic����,並映射到TSN流上。
例如�����,自動駕駛中某些Topic分類:
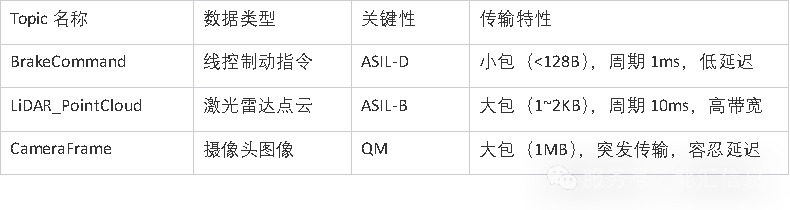
通過上表中的Topic分類原則����,可將3個Topic分別映射到對應的流量上:Command-控製類�、Info數據類���、Cam圖像類���,如下圖所示。
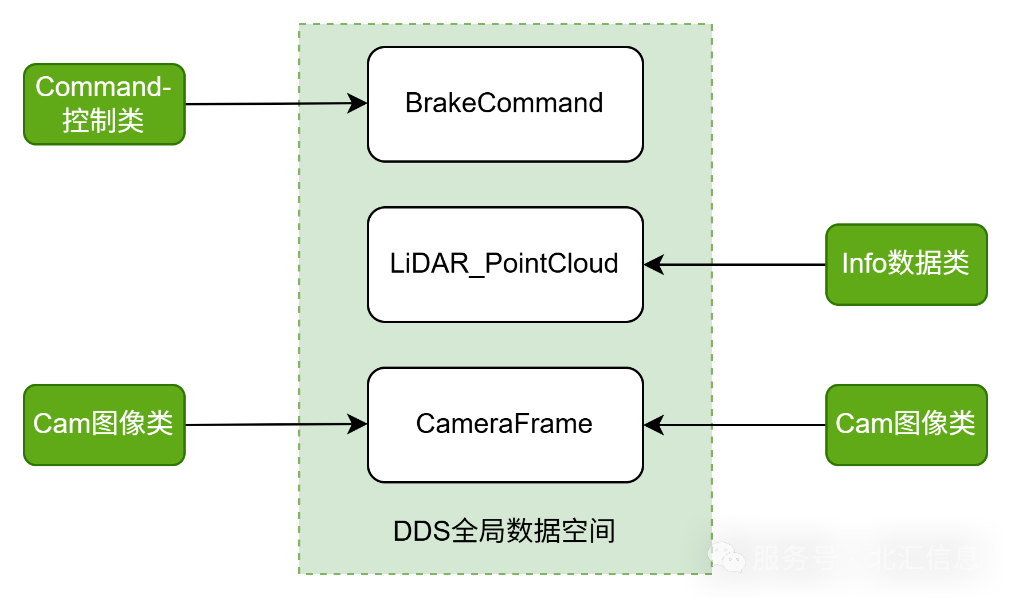
圖7 Topic和流量的映射
3.DDS QoS策略設計與TSN調度策略映射
DDS的QoS參數需與TSN的網絡調度策略相映射��,形成端到端確定性保障。具體配置有:
通過VLAN PCP映射實現跨層優先級傳遞
冗餘覆蓋單點故障場景�,保障可靠性傳輸
基於TSN策略(優先級/Qbv)保障確定性傳輸
CBS/ATS降低交換機的內存使用
……
對於確定性傳輸�����,在DDS的QoS部署配置中�,需要按需補充TSN策略中對應的參數(整形算法���、門開/關時間等)。
例如����,OMG DDS-TSN規範7.2.3中定義的TrafficSpecification中�,增加了transmission_selection傳輸選擇算法參數:
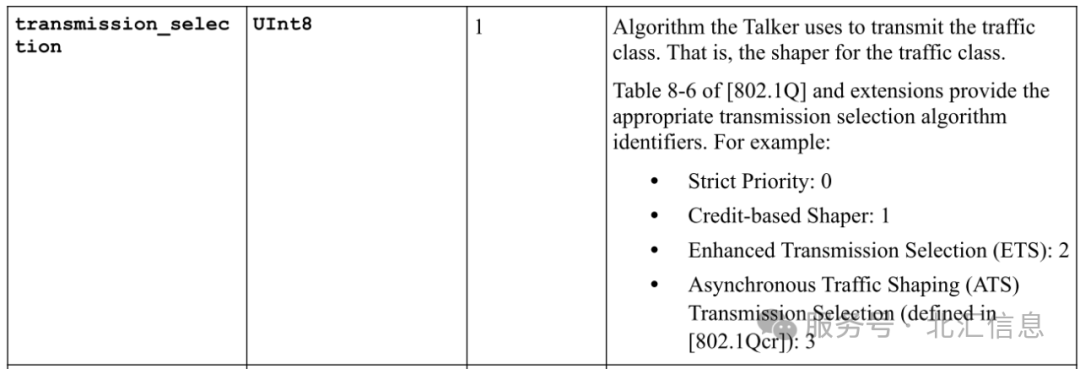
將TrafficSpecification定義在DataWriterQoS中�,將DDS的QoS需求與TSN的調度關聯起來��,保證其確定性傳輸。
其餘映射可根據實際需求進行設計實現。
4.DDS-RTPS層的處理
RTPS是DDS的默認底層通信協議�����,它定義了DDS實體(如Publisher/Subscriber)之間通過網絡交換數據的規則。DDSI-RTPS 對底層技術的要求很少�,為在TSN網絡上實現確定性傳輸����,對RTPS協議有一些特殊的要求。比如:
消息模塊中傳輸的子消息類型的限製��,負責實現可靠性的RTPS子消息(例如GAP���、ACKNACK����、NACKFRAG)是非必要的����,限製其傳輸
發現模塊(SPDP/SEDP)默認不區分TSN與非TSN應用�����,可能引發不匹配的通信����,需要進行兩者之間的約束
……
具體的實現同樣依據實際需求。
5.協議映射
OMG提出兩種技術實現DDS和TSN的數據協議映射��,提高協議棧運行效率:
RTPS/UDP/IP/TSN:將 RTPS 消息映射到 UDP 消息��,由 TSN 網絡傳輸 UDP 消息�,能夠解決傳統以太網的不確定性問題
RTPS/TSN:將 RTPS 消息直接映射到以太網幀�����,由 TSN 網絡傳輸以太網幀����,能夠解決操作係統網絡 I/O 以及傳統以太網的不確定性問題
上述兩種方式在汽車領域中均有使用����,本文方案設計采用後一種方式。
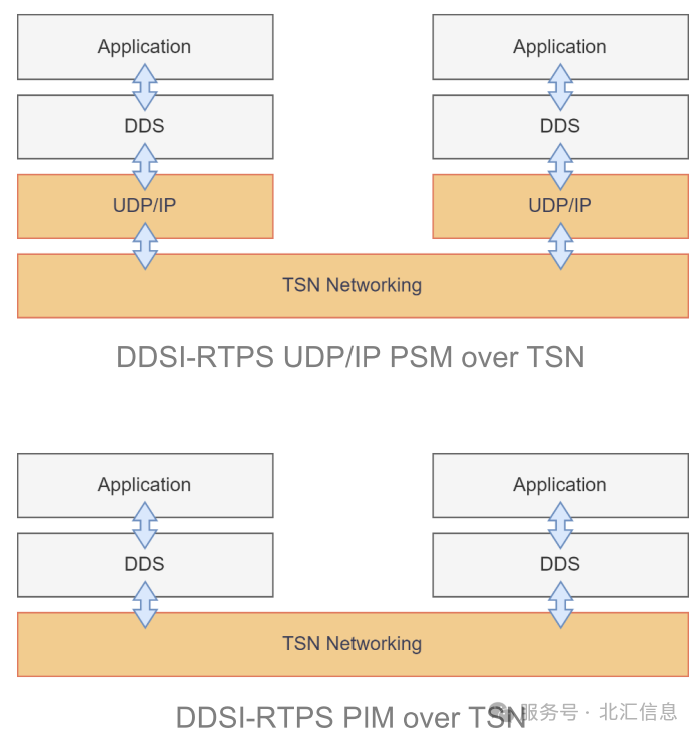
圖8 DDS-TSN的協議映射
2.3.搭建原型
DDS-TSN原型搭建分為:硬件配置和軟件配置兩部分。
硬件配置:采用支持TSN協議的交換機和開發板�����;
軟件配置:集成TSN和DDS協議棧的配置及參數定義�,實現各個應用組件的TSN和DDS模塊配置。
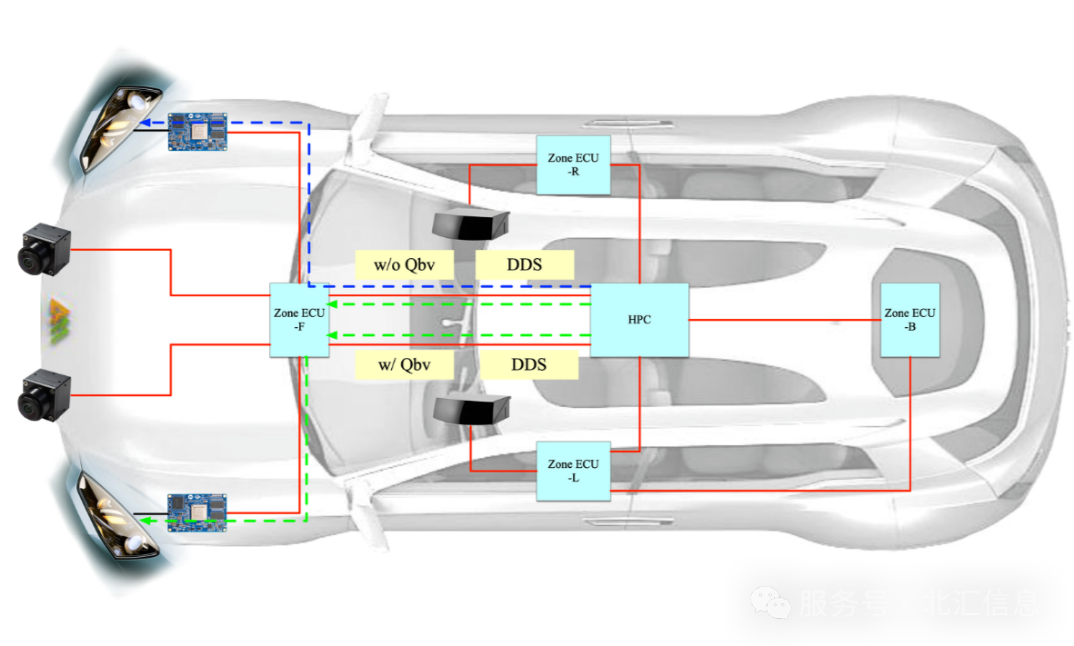
圖9 DDS-TSN原型示意圖
2.4.評估指標設計
貫穿全文的是一個重點:DDS-TSN可實現確定性和可靠性端到端通信���,故以可靠性和確定性時延兩個指標來評估。
1.可靠性驗證
對於需要有可靠性保證的Topic����,在部署上會存在2個通路來進行數據傳輸�����,一個作為主運行通路��,另一個作為備份。當主運行通路出現故障時���,可通過CB協(xie)議(yi)自(zi)動(dong)切(qie)換(huan)至(zhi)備(bei)份(fen)通(tong)路(lu)進(jin)行(xing)傳(chuan)輸(shu)���,保(bao)證(zheng)其(qi)可(ke)靠(kao)性(xing)。作(zuo)為(wei)對(dui)比(bi)���,另(ling)一(yi)個(ge)實(shi)驗(yan)無(wu)冗(rong)餘(yu)通(tong)路(lu)作(zuo)為(wei)備(bei)份(fen)。然(ran)後(hou)對(dui)比(bi)驗(yan)證(zheng)�����,兩(liang)種(zhong)情(qing)況(kuang)下(xia)的(de)數(shu)據(ju)是(shi)否(fou)能(neng)正(zheng)常(chang)傳(chuan)輸(shu)。
2.確定性時延驗證
為了展示確定性傳輸的特性����,需要使用Qbv協議對流進行保護。作為對比�����,另一個實驗無Qbv作為保護。然後對比驗證����,兩種情況下的數據是否能正常傳輸。
2.5.實驗結果展示
針對上麵2個指標的實驗�,可以得到如下圖示結果:
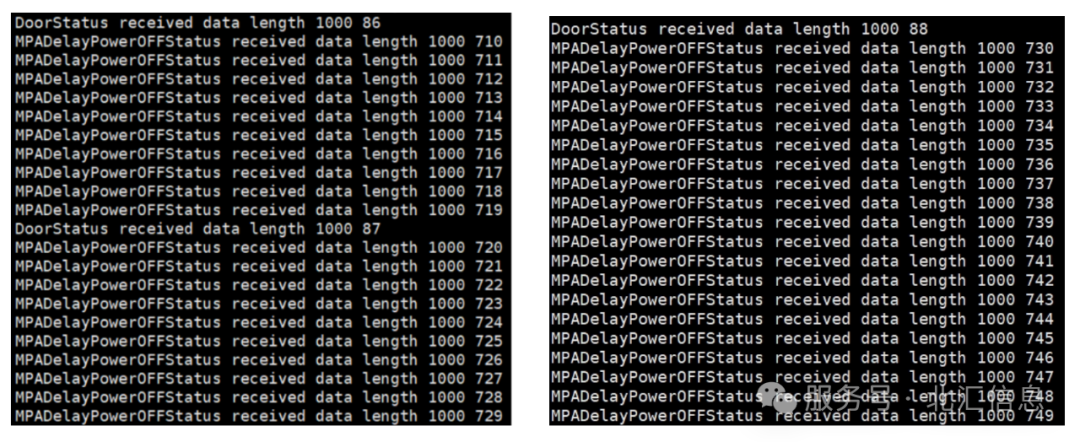
圖10 DDS-TSN原型對比驗證可靠性結果示意圖
在使用CB對關鍵的數據流進行備份後�����,其中一個通路斷開不會對數據傳輸產生影響�,而如果沒有CB的保護�,數據流使用的通路斷開後將無法傳輸數據。

圖11 DDS-TSN原型對比驗證確定性時延結果示意圖
對於沒有Qbv保護的數據流會受到背景流量的影響��,造成時延增加��,而在Qbv保護下���,背景流量不會影響主題數據的傳輸���,能夠確保主題數據傳輸在限定時間內完成。
總結
通過上述實現的精細配置�����,DDS-TSN能夠將軟件定義的數據分發能力與硬件級的時間確定性深度結合��,為實時係統提供 “既快又準”的通信基座。這一技術組合����,正在成為自動駕駛等領域的核心基礎設施����,重新定義實時係統的性能邊界。