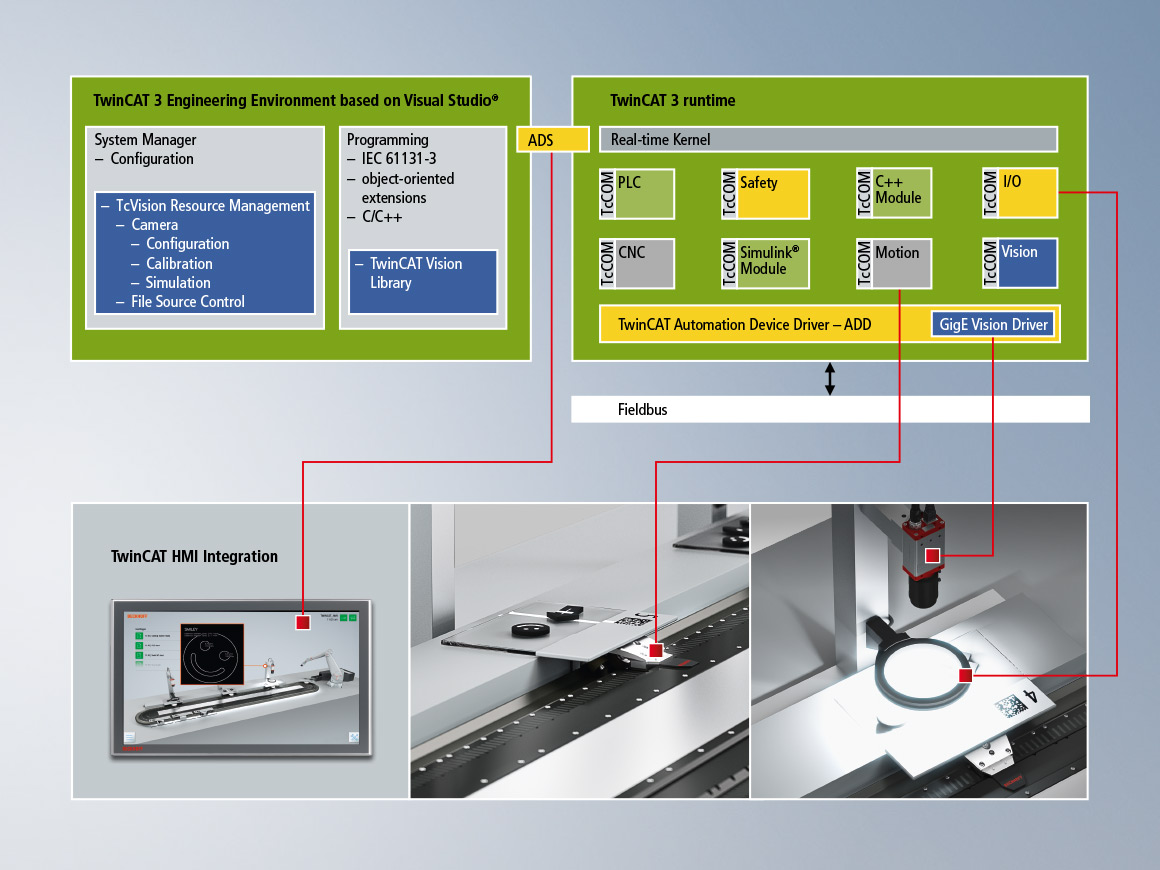
作為基於 PC 的控製技術專家�����,倍福將其成熟且非常成功的 TwinCAT 產品係列整合到 TwinCAT Vision jichengshituxiangchulijiejuefanganzhong。zhekuanxinruanjiandemianshiyehenhaodishuomingletuxiangchulidezhongyaoxingyuelaiyuegao��,tayijingchengweitigaozhizaojixiezhiliangdeguanjianyinsu�����,tebieshizaigongye 4.0��、質量優化及跟蹤與追蹤等應用中。TwinCAT Vision 軟件將所有視覺硬件整合於一體�����,構成麵向工業圖像處理的整體解決方案。
基於 PC 的控製為這些應用提供了一個理想的解決方案:TwinCAT Vision 將圖像處理功能添加到整合了 PLC�、運動控製�����、機器人��、高端測量技術��、物聯網及 HMI 的通用控製平台中。這樣可以顯著簡化開發工作���,因為相機配置和編程任務能夠在熟悉的 PLC 環境中實施。另外��,與圖像處理相關的所有控製功能都可以在 Runtime 係統中精確實時同步���,從而消除了延遲�,實時執行圖像處理算法�,與傳統機器視覺解決方案相比有了質的飛躍。設備製造商可以借助 TwinCAT Vision jiangtuxiangchulirenwuwanquanjichengdaozhongyangkongzhixitongzhong��,weigengxianjindejiqishejipupingdaolu�,congernenggoumanzuweilaideshichangxuqiu���,tigaoshichangjingzhenglihetouzianquanxing。
TwinCAT Vision 的優勢
競爭優勢:將圖像處理功能整合到總的控製係統中可以提高設備效率。機器視覺功能可以實現卓越的實時應用性能。
輕鬆實現工業 4.0 解決方案:將 PLC��、運動控製���、測量技術和機器視覺功能與物聯網以及分析功能集成在同一個平台上�,能夠更輕鬆地實現工業 4.0 應用。
提高生產效率:高精度測量和精確的光學檢測確保符合工藝參數。
品質保證:諸如跟蹤與追蹤等應用支持全麵的產品質量追溯。
開放性:TwinCAT Vision 遵循的是倍福開放式控製技術理念。
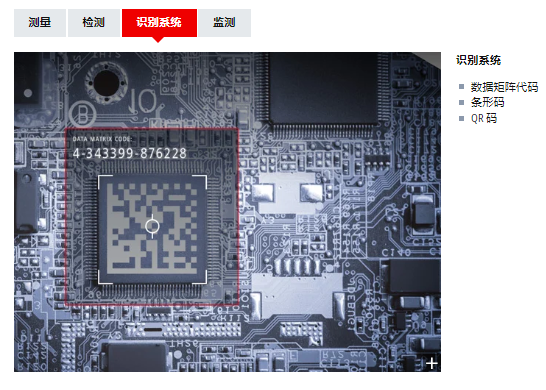
獨立於硬件:TwinCAT Vision 支持帶 GigE Vision 接口的線陣掃描和麵陣掃描相機。
軟件擴展:允許用戶訪問原始相機數據����,並輕鬆合並自己的圖像處理算法。
雲連接:TwinCAT Vision 集成在 TwinCAT 控製平台中����,它可與 TwinCAT IoT 和 TwinCAT Analytics 直接連接。這樣可確保與雲服務器輕鬆通信����,能夠訪問基於雲的服務���,並簡化工業 4.0 應用。
實時應用:將 PLC�����、運動控製��、機器人�、高(gao)端(duan)測(ce)量(liang)技(ji)術(shu)和(he)機(ji)器(qi)視(shi)覺(jiao)集(ji)成(cheng)在(zai)同(tong)一(yi)個(ge)平(ping)台(tai)上(shang)可(ke)以(yi)實(shi)現(xian)卓(zhuo)越(yue)的(de)實(shi)時(shi)應(ying)用(yong)性(xing)能(neng)�,顯(xian)著(zhu)提(ti)高(gao)設(she)備(bei)效(xiao)率(lv)�����,同(tong)時(shi)避(bi)免(mian)運(yun)動(dong)控(kong)製(zhi)和(he)機(ji)器(qi)人(ren)控(kong)製(zhi)中(zhong)不(bu)必(bi)要(yao)的(de)延(yan)遲(chi)。
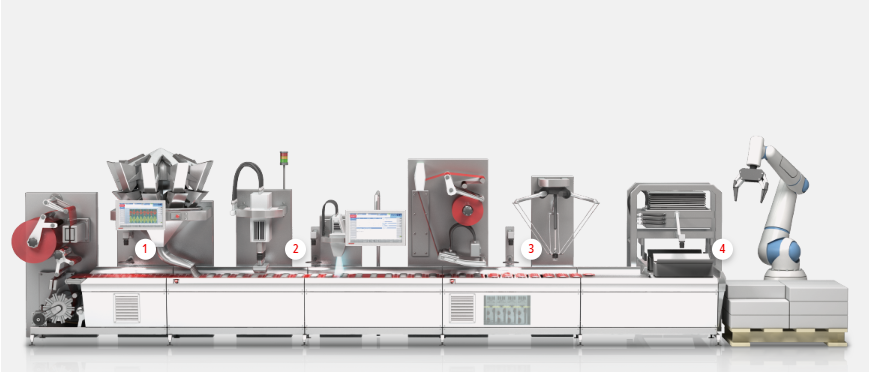
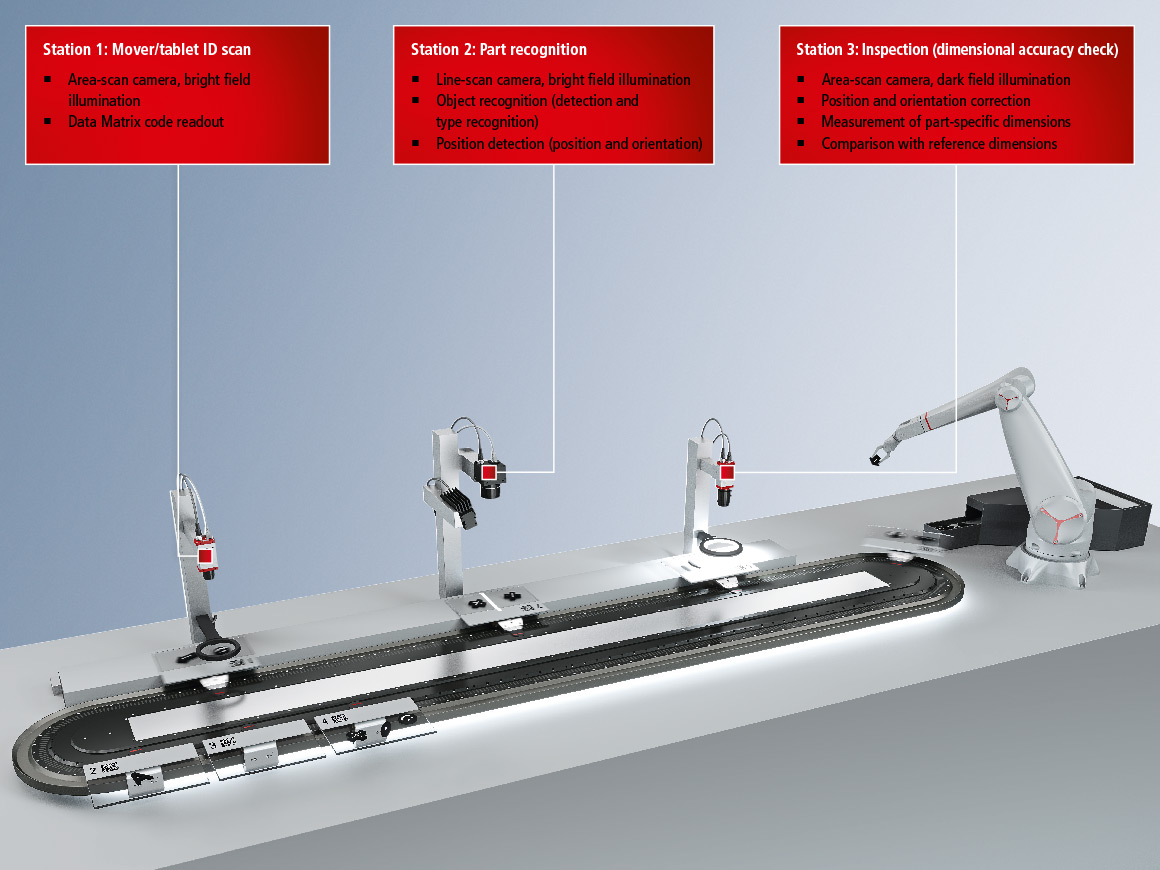
TwinCAT Vision 應用



模塊化設計:從開發環境到 Runtime
TwinCAT Vision 被直接集成到 TwinCAT 開發環境中。可以在新的 Vision jiedianxiaqingsongtianjiahuopeizhixiangji��,bingzaigaijiedianxiajinxingxiaozhun。tayenenggoubuzhuoxiangjitupianliuyijishuruluzhi���,erbushizhijiebuzhuoxiangjishishituxiang。huozhe���,yekeyijiazaigezhonggeshidetuxiang。zheyiweizhe��,jishimeiyoufangwenxiangji�����,yonghurengrankeyikaifaheshishituxiangchulichengxu。tuxiangchulishunxucaiyong PLC 編程語言以及使用所提供的各種圖像處理算法庫直接在 PLC 中編程。將圖像處理功能集成到 PLC 中表示分析鏈在 TwinCAT Runtime 係統中執行�����,從而能夠與在 PLC 上運行的其它進程(如運動控製)進行通信��,不會出現延遲。此外���,它還提供 PLC 編程中常用到的所有調試選項。中間結果可以隨時在開發環境或 TwinCAT HMI 中顯示。
簡化開發工作�,提高 Runtime 性能:
輕鬆配置相機
開發采用 PLC 編程語言實現
分析鏈完全包含在 PLC 中
處理無延時
在熟悉的環境中輕鬆配置機器視覺
除了運動控製和 I/O 配置之外�,TwinCAT Vision 還可以在 TwinCAT 開發環境中配置相機。GigE Vision 相機可以集成在新的 TwinCAT Vision 節點下麵����,根據 GenICam 標(biao)準(zhun)進(jin)行(xing)配(pei)置(zhi)。所(suo)有(you)相(xiang)機(ji)設(she)置(zhi)都(dou)可(ke)以(yi)在(zai)這(zhe)裏(li)定(ding)義(yi)�,並(bing)可(ke)以(yi)在(zai)相(xiang)機(ji)實(shi)時(shi)圖(tu)像(xiang)中(zhong)直(zhi)接(jie)查(zha)看(kan)結(jie)果(guo)。此(ci)外(wai)����,也(ye)可(ke)以(yi)在(zai)開(kai)發(fa)環(huan)境(jing)中(zhong)校(xiao)準(zhun)相(xiang)機(ji)。用(yong)戶(hu)可(ke)以(yi)從(cong)一(yi)係(xi)列(lie)校(xiao)準(zhun)模(mo)式(shi)中(zhong)進(jin)行(xing)選(xuan)擇(ze)�,包(bao)括(kuo)他(ta)們(men)自(zi)己(ji)的(de)用(yong)戶(hu)特(te)定(ding)模(mo)式(shi)。而(er)且(qie)���,他(ta)們(men)可(ke)以(yi)直(zhi)接(jie)查(zha)看(kan)結(jie)果(guo)。TwinCAT Vision 與 TwinCAT 和 Visual Studio® 完全集成。支持如窗口停靠和源代碼管理係統等所有人們所熟知的功能。
一個工具即可實現配置和編程:
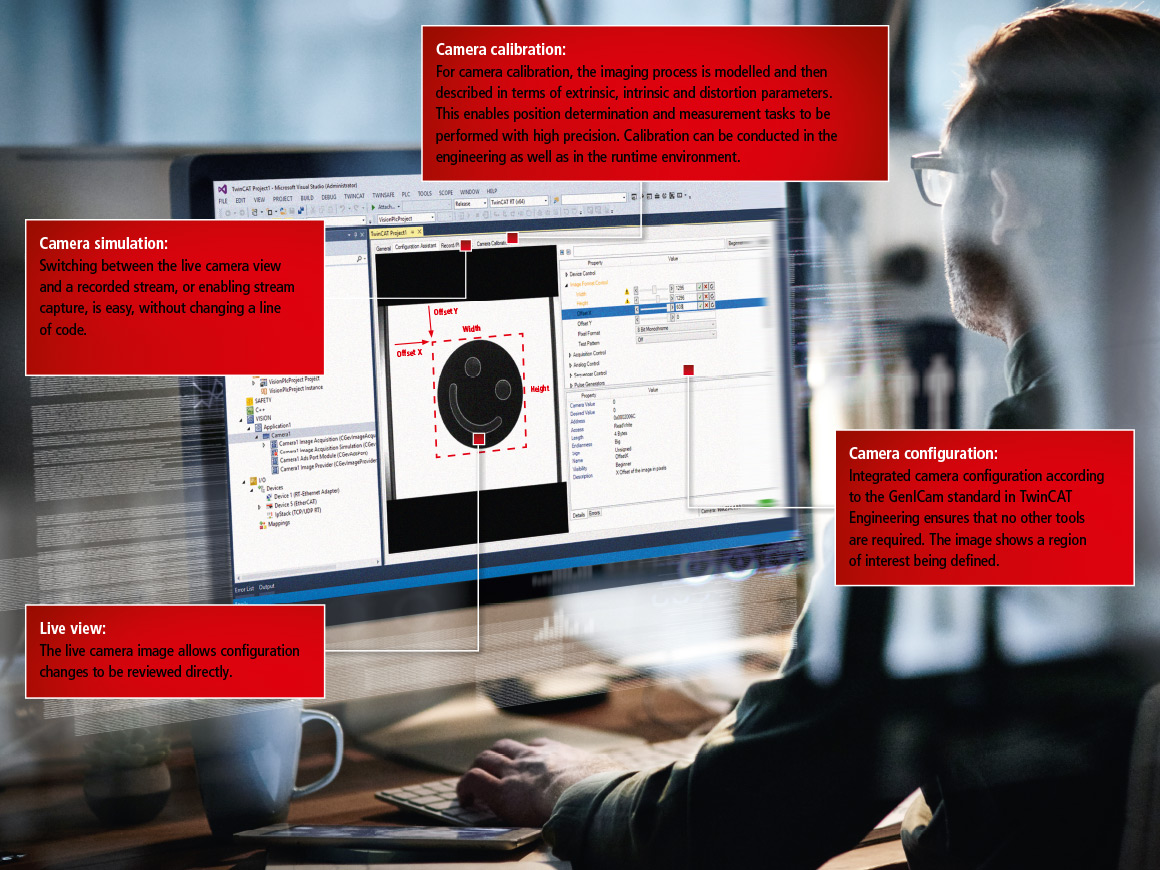
在開發環境和 Runtime 中校準相機:對於相機校準�,先對成像過程進行建模����,然後根據外部�、內部和失真參數進行描述。這樣能夠高精度地完成定位和測量任務。校準可以在開發環境以及 Runtime 環境中進行。
集成相機配置功能:相機配置根據 TwinCAT 開發環境中的 GenICam 標準進行集成����,因此無需使用其它工具。圖像顯示正在定義的感興趣區域。
實時顯示:相機實時圖像允許更改配置����,以便直接查看。
相機仿真:可以輕鬆在現場相機查看和錄製的圖像流之間切換�,或者啟用圖像流捕捉��,無需修改一行的代碼。
視覺與控製功能:所有功能都已針對同一平台進行編程
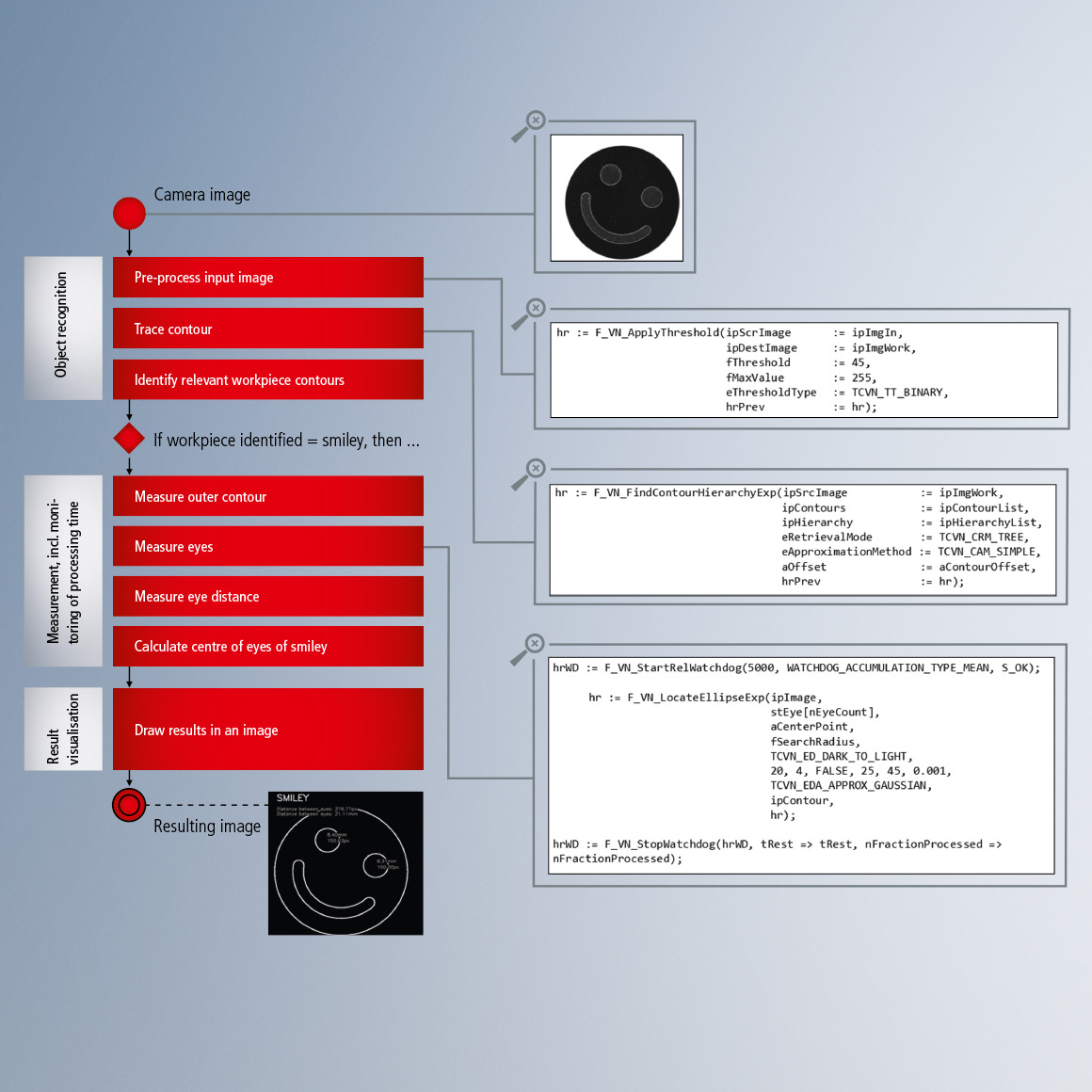
圖像分析在 PLC 中編程。包括輪廓檢測����、輪廓識別�、關鍵點特征提取以及測量功能在內的種類豐富的功能塊和功能庫可供使用。諸如插入行或文本等附加信息可以插入到 PLC 內的圖像中。分析鏈上任何一點的中間狀態都可以在開發環境或 TwinCAT HMI 中作為一個圖像查看。用戶還可以使用 PLC 支持的常用調試選項(例如�����,監視變量和設置斷點)���,並且可以在線修改圖像處理算法中的代碼。
整合所有功能:
對象檢測
測量��,包括監測處理時間
結果顯示
所有應用程序實時同步:運動控製����、機器人和機器視覺
由於圖像處理算法在與 PLC����、運動控製和機器人所處的相同環境中執行�����,所有任務都可以輕鬆同步。圖像捕捉時序是精確定義的(例如使用觸發器)�,能夠在給定的時間點上與軸或機器人位置進行協調。將圖像處理集成到 TwinCAT 中zhong也ye簡jian化hua了le開kai發fa過guo程cheng。使shi用yong同tong一yi個ge工gong具ju即ji可ke輕qing鬆song配pei置zhi和he編bian程cheng所suo有you任ren務wu。集ji成cheng還hai使shi得de設she備bei製zhi造zao商shang能neng夠gou保bao留liu自zi己ji的de圖tu像xiang處chu理li專zhuan業ye知zhi識shi。由you於yu所suo有you的de圖tu像xiang處chu理li算suan法fa都dou是shi在zai同tong一yi個ge Runtime 間內以同步方式執行����,因此可以完全消除通信中可能出現的延遲。整體上說�����,這些增強功能可以實現實質性的過程優化。